 english
englishpicoQuadcopter

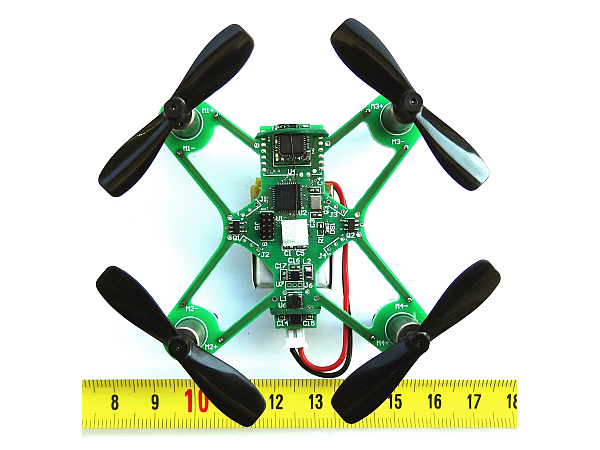
Nun mal ein Projekt zum Spielen aber nicht ohne die gewisse Herausforderung - die Regelungstechnik. Ein extrem kleiner Quadcopter(Quadrocopter) der mit einem Achsabstand von nur 5cm * 5cm sicherlich zu den Kleinsten gehört...
Basierend auf einem STM32F103TBU und einem MPU9150 kann er - mit einem DelTang RX31 bestückt - mit DSM2 kompatiblen Sendern, - mit einem Bluetooth Modul SPBT2632C2A.AT2 bestückt - per Smartphone/Tablet oder mittels Infrarot gesteuert werden. Dabei kann er kleine Bürstenmotoren direkt treiben oder kleine Brushless Motoren mittels externer ESC's. Welche Motoren-Art und welcher Empfänger bestückt ist kann er selbst erkennen.
Aber von Anfang an ...
Nachdem sich in den letzten Jahren Job und Hobby mehrfach überschnitten haben oder Privates durch das Berufliche "in Besitz" genommen wurde, suchte ich nach einem neuen privaten Bastelprojekt - thematisch weit weg vom Job.
Inspiriert durch zwei erworbene RTF Modelle (ready-to-fly) und die vielen verschiedenen Projekte im Internet (siehe Linkliste unten) reizte mich der Bau eines eigenen sehr kleinen Quadcopters mit der Maßgabe - alle Software selbst zu entwickeln um zu verstehen was warum wie funktioniert.
Mir war natürlich klar, daß - obwohl ich mal Automatisierungstechnik/Regelungstechnik vor vielen Jahren studiert hatte - es ein steiniger und langer Weg würden werde. Also einfach mal aufbauen, fremden Code reinladen und losfliegen wird's - und soll's - eben nicht sein.
Und so sammelte ich erste Ideen zu meinem "picoQuadcopter". Als Fernsteuerung soll auf alle Fälle zuerst eine Standardvariante im Modellbau funktionieren, also kein PC-Adapter oder Gamepad mit Middleware. Da fiel mir wieder DSM2 als Quasistandard ein. Und bei DelTang gibt es dazu passend auch einen super kleinen und leichten Empfänger Rx31. Und im Internet gibt es neben den Spektrum DSM Sendern auch preiswerte Alternativen, von denen ich mir gleich eine besorgte - die Blade MLP4DSM.
Aber auch die Verwendung von Android reizte mich wieder und so fand ich ein super kleines SPP Bluetooth Modul von STM, das SPBT2632C2A.AT2, dessen Beschaffung jedoch einige Schwierigkeiten machte. Zusätzlich wurde auch die Montage einer sehr kleinen 5.8GHz Kamera TE60A und deren Stromversorgung vorgesehen. Diese soll laut Youtube ein besseres Bild liefern als die Alternative CM205.
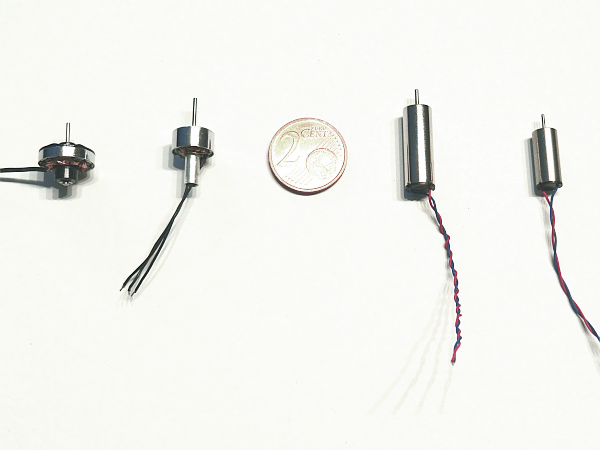
Als Motoren waren natürlich als startup normale Coreless Bürstenmotoren vorgesehen. Aber auch die Verwendung von sehr kleinen Brushless Motoren mittels mini ESC-Modulen sollte gleich mit ins Design einfließen. Und so wurden die
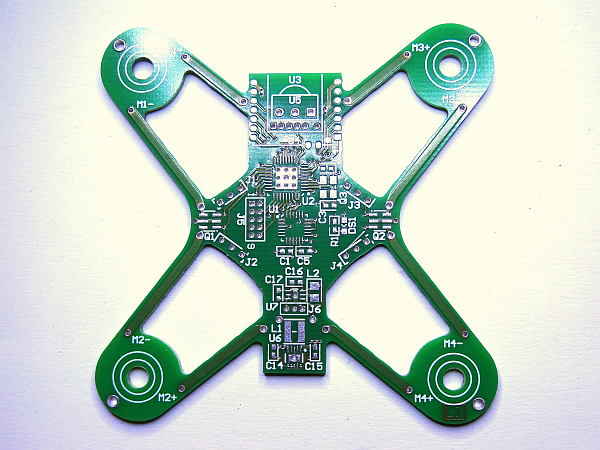
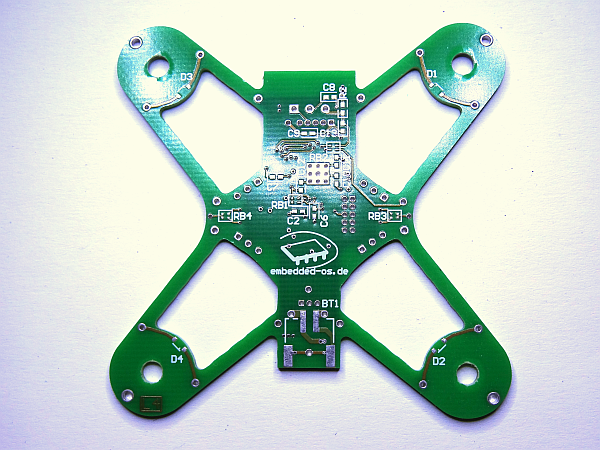
Auf Grund meiner jahrelangen guten Erfahrungen mit ARM-Prozessoren wählte ich den STM32. Dieser bietet alle erforderlichen Interfaces und das in einer sehr kompakten Bauform VFQFN 36 (STM32F103TBU).
|
Der erste Aufbau sollte natürlich einen schnellen Start in die Softwareentwicklung ermöglichen: also Hubsan Coreless Bürstenmotoren + RX31 DSM2-Empfänger.


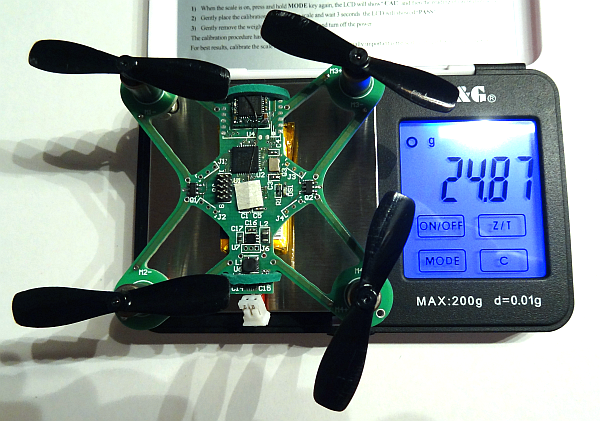
Und natürlich gings auch gleich auf die Waage.



Uns so ging es and die Entwicklung der Software für den picoQuadcopter. Nachdem der System-Init, die PWM-Ausgänge für die Motoren, die I2C-Kommunikation mit dem Sensor MPU9150 und die UART-Kommunikation mit dem RX31 aufgesetzt waren, wurde eine erste sehr einfache PID-Regelung aufgesetzt und getestet.
Nach etlichen Runden im Detailkampf mit der I2C-Kommunikation und der Regelung entstand ein erstes Beweisvideo über die ersten Flugversuche - es ist ein Knallfrosch :-)
Und so geht die Entwicklung der Software weiter...
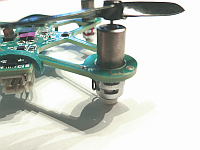
Parallel dazu entstehen weitere Aufbauten mit dämpfender Motorhalterung, Brushless Motoren, Bluetooth und FPV ... (siehe second versions & FPV).
Links zu anderen Quadcopter Projekten:




 About Me
About Me Contact
Contact Photos
Photos