 english
englishpicoQuadcopter

Nach dem Aufbau des ersten Quadcopters mit direkt eingesetzten Motoren und den daraus resultierenden Vibrationen, die sich bis in die Messwerte des IMU auswirkten und diesen Quadcopter schwer regelbar machen, wurde für die weiteren Aufbauten eine neue, aber weiterhin einfache, dämpfende Motormontage gesucht.
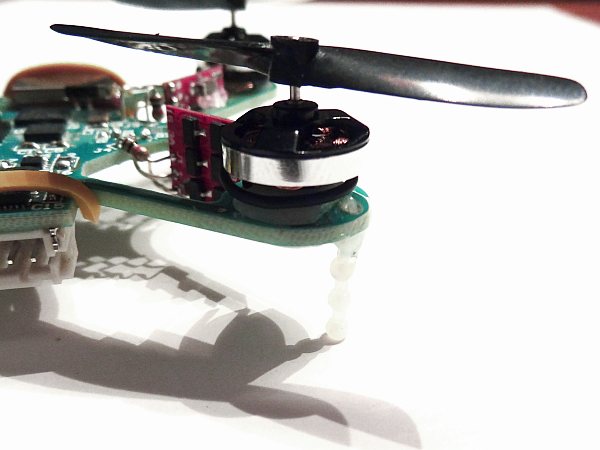
Angeregt durch sogenannte Schwingungsdämpfer von Modellhubschraubern suchte im Bereich der Durchführungsgummis nach einer passenden Lösung. So können Canopy grommets für sehr kleine Motordurchmesser verwendet werden. Ab 4mm bis hin zu 10mm können dann normale kleine Durchführungsgummis verwendet werden. Diese bekommt man alle im Internet.
Und so fand ich die Canopy grommets MSH51054 für den Protos500 Hubschrauber als perfekt passende Dämpfungsaufhängung für die Hextronik 2g Brushless Motoren. Für die anderen Motoren verwende ich kleine Durchführungsgummis, die ich wie gesagt im Internet erstand.


Dazu müssen natürlich die Löcher nun für die Motormontage etwas größer ausgelegt werden. Nun erweist es sich als Nützlich, daß bei Layouten der Rahmen um die Motoren etwas größer ausgelegt wurde :-) . Nachfolgende Tabelle zeigt die benötigten Maße jeweils zu den Motoren:
| Motor | Durchmesser Motor Mount | Durchmesser für Gummi |
| X-Twin | 6.0mm | 7.5mm |
| Hubsan/Ladybird | 7.0mm | 8.5mm |
| Hextronik 2g | 3.5mm | 5.0mm |
| HP02T | 5.5mm | 7.0mm |
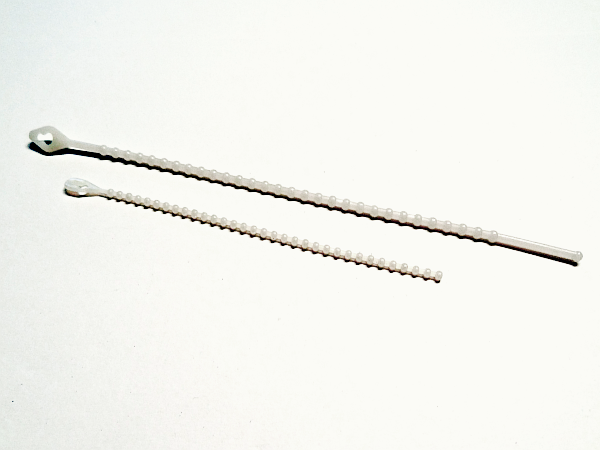
Da nun die Ladybird Füsse, direkt am Motor montiert, nicht mehr verwendet werden können und für die anderen Motoren eh eine generische Lösung benötigt wird, suchte ich nach 'irgendeiner' Variante am Besten aus leichtem Kunststoff.
Durch Zufall fand ich in einem Baumarkt "Knotenbänder", von denen kurze Abschnitte die perfekte Lösung darstellen - flexibel und doch stabil genug. Eingeklebt in den Löchern, die für die Füsse oder einen Schutzrahmen vorgesehen waren, erfüllen sie genau die Anforderungen.

Auch für die Propeller suchte ich nach einer Alternative zu den Silverlit X-Twin Sets. Propeller unter 50mm sind jedoch nicht typisch. Bei Amax und für den Blade Nano QX wurde ich mit 46mm Propeller fündig.


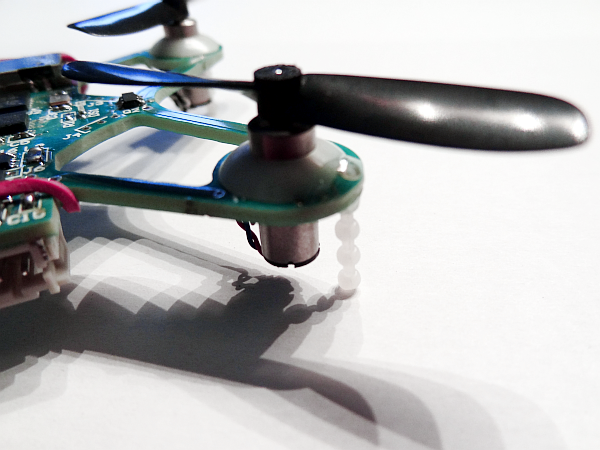
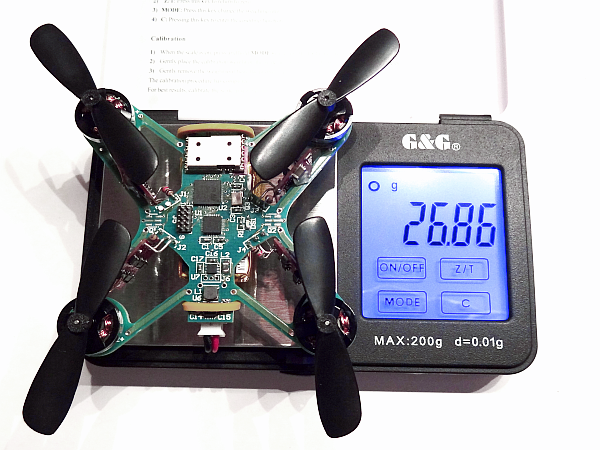
Und so geht es an den Aufbau der geplanten Kombinationen aus Motor & Empfänger...





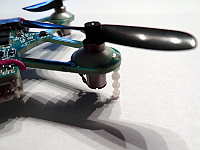








Dabei sitzen die Motoren des zweiten Aufbau's mit Hubsan Motoren & DSM2-Empfänger absichtlich so weit oben. Dieser Aufbau soll die erste Variante sein, auf dem die 5.8GHz Kamera als FPV getestet werden soll. Sicherlich muss dazu die Regelung nochmals getrimmt werden - immerhin bringt die Cam ein Mehrgewicht von gut 4gram mit sich.






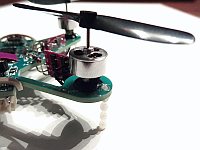
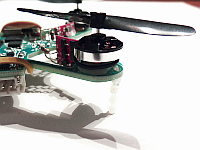
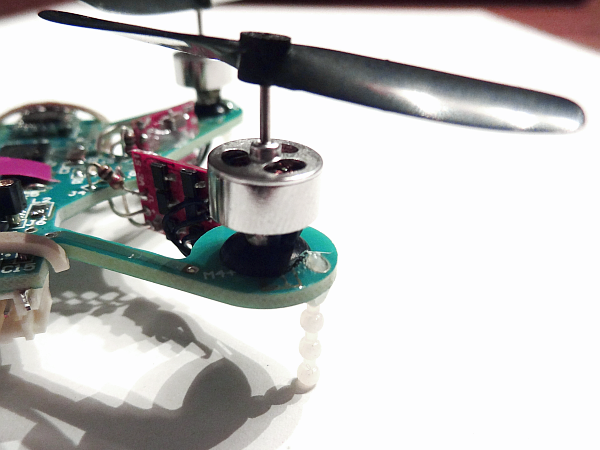
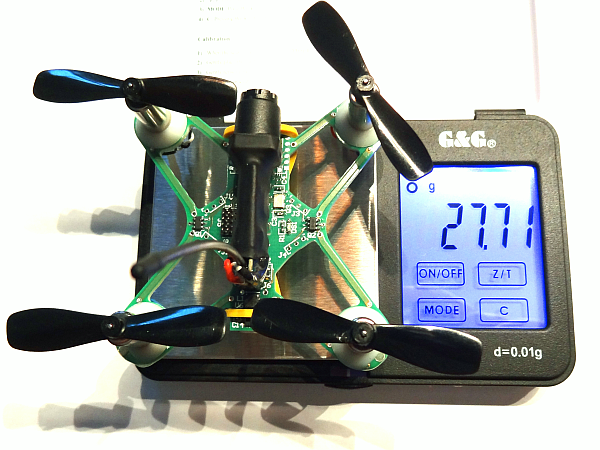
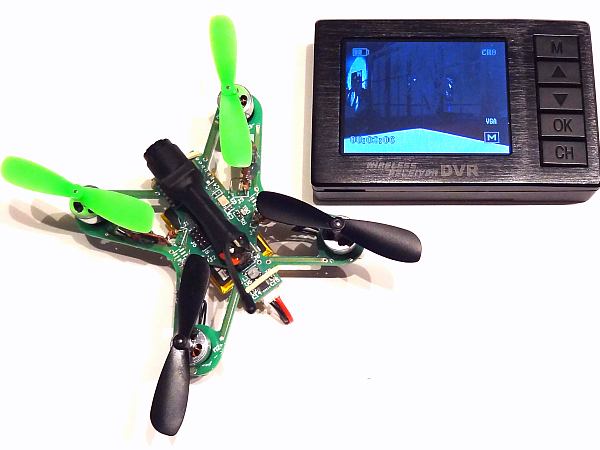
Und auch mit den Hextronik 2g brushless Motoren lässt sich eine FPV Version gut realisieren. Diese Motoren sind (in dem Fall mal positiv) hoch genug, um die 5.8GHz Kamera zu montieren.



Damit werde ich nun genug Material haben, dem stabiles Fliegen beigebracht werden muss :-)
Als kleiner Pausenfüller, wenn ich die PID-Regelvariablen zwischendurch mal nicht mehr sehen mag, arbeite ich auch an einer sehr keinen Variante eines DSM2 Transmitters/Controllers ...























 About Me
About Me Contact
Contact Photos
Photos